| 小型无人机:产品、自主飞行与未来 分享到: |
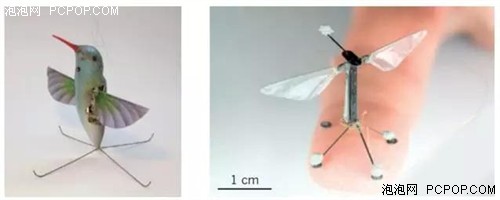
小型无人机(本文关注尺寸小于1m,重量低于4kg),按其飞行模式划分,可分为固定翼、旋翼和基于仿生设计的扑翼三大类。每一种飞行类型都有其独特优点和缺点。例如,固定翼飞机能够快速和高效的飞行,但通常不能悬停。旋翼机可以悬停、机动性能好,但通常能量效率比较低。仿生扑翼飞行器提供了一个替代性范式,它可以按比例缩小尺寸(固定翼和旋翼却不能),但目前在空气动力学、机械设计和控制能有巨大的挑战。
固定翼
旋翼
扑翼飞行器 飞行时的能耗极大,小型无人机主要使用锂电池和电机作为动力源,飞行器越小时,能量利用效率通常会越差。主要因为小尺寸的电机电磁功率密度会降低、桨盘面积变小、增加减速齿轮后传动效率的下降、由于雷诺数变小也会带来更大的粘滞损失。下图为当前小型无人机产品的重量与飞行时间。固定翼飞行时间相对较长,但飞行时间短却是影响旋翼无人机使用的瓶颈问题之一(几分钟到几十分钟不等)。但多旋翼无人机由于可以悬停、机动性能好、结构简单、成本低等优点,近年来得到了迅速普及。目前而言,也更适合作为空中机器人平台进行开发。本文并列举对比当前的一些主流的、成熟的多旋翼平台,并就无人机自主飞行的未来发展进行探讨。 四旋翼飞行器产品
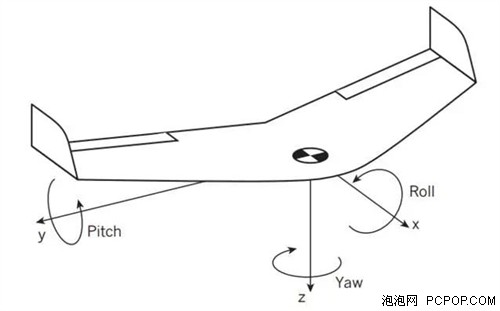
低成本无人机的市场在过去的两年呈爆炸式增长。在这期间涌现出了一些新的品牌和型号,主要是多旋翼直升机,并且有一些组织和网站专注于这些产品的发展。在这我们将注意力集中在一些流行的、成熟的商业品牌,而不是一些从初创公司或者某一个研究项目当中诞生的最新奇的平台。相比于更多的定制方案,要在一个具有广泛用途的平台上工作,通常要确保硬件测试良好并且该平台具有长期技术支持。在此,我们列举一些至2015年7月并具有代表性的无人机平台。 我们主要关注那些开箱即用(RTF)的飞行器,这些飞行器设置和校准只需要很短时间。然而,RTF飞行器通常都具有编程和扩展的局限性,因此难以定制。在此我们不仅讨论手动遥控应用,还包括自动飞行。对于每一个平台,我们主要关注飞行器所使用的传感器及控制方法。一般情况下,所列出的全部旋翼机都具有飞行控制系统,以及某种类型的相机(嵌入式的或作为一个单独的设备)以及无线数传连接设备,绝大多数中还包括GPS模块。 Parrot在2012年在parrotciteweb上推出了广受欢迎的AR.Drone2.0.。2.0版售价为400美元,重量为420克。它有两个板载内置摄像头,一个在底部,传输标准为QVGA(320×240像素分辨率),每秒60帧,用于测量地面速度,另一个是高清前置摄像头(1280×720像素分辨率),每秒30帧进行视频录制。飞行稳定系统由一组三轴陀螺仪,加速度计和磁力计,除此之外,还有气压传感器,该系统可以承受高达24公里/小时的风。有一对超声波传感器可以帮助飞行器保持一定高度贴近地面飞行(最高可达6m)。板载飞行控制器运行Linux操作系统。代码不开源,但使用ParrotSDK或其他API,人们可以使用远程访问功能,诸如:在线接收照相机图像帧、导航和其他传感器数据,并发出在各个轴向的速度控制指令,以及起飞和着陆的命令。这些操作只能使用wifi和飞行器进行通讯实现。此项目旨在扩大控制范围或允许板载可编程性,但这不是作为正式产品的一部分。另外,由Parrot的标准版可扩展一个GPS模块,需额外支付120美元,这就可以通过指定航点对飞行器进行路径规划,飞行距离甚至可超出WiFi的范围。然而,当飞行器超出WiFi的范围时是不能被控制的。除这款模型之外,Parrot在2014年底还推出了Bebopdrone,Bebop售价为500美元,另外,这款飞行器还提高了图像处理与录制能力(1400万像素的图片并以每秒30帧进行视频录像,像素为1920×1080),具有一个内置的卫星定位系统(GNSS,包括GPS和GLONASS),操作范围为250m,选配Skycontroller,成本大约400美元,可使操作范围可以扩展到2km。 同类产品中的XaircraftX650Pro,使用SuperX飞行控制器。以及MikrokopterQuadrokopterXL,使用FlightCtrlME飞行控制器。价格在1000美元左右,重量在1000-1500g。控制器实现飞行器的稳定一般都是通过一套传感器:气压传感器、三轴陀螺仪、磁力计和加速计。但Mikrokopter无人机控制器的一个特点是它对高度的感知可以高达5000m。这两种无人机都安装有外置摄像机,其中X650Pro飞行控制器还内置了摄像机云台的控制功能。理论上讲,只要不超过负载极限,任何可用作记录的装置都可以挂载到这些无人机上,(这两款无人机的负载约1kg)。 大疆生产的旋翼航拍机,如精灵系列,价格在1000美元左右,重量1200g左右。众所周知,大疆的飞行器具有很好的稳定性和操纵体验,但他们的飞行控制器仅允许用户使用图形界面,通过GPS航点进行路径规划。公开提供的产品说明也极少提供关于飞控的技术信息,因此在此也无法进行详细分析。其飞控均支持外扩GPS模块。较新的Inspire平台配有专有的一体化云台相机,相机可以录制1080p、以及4K,每秒30帧的高清视频,其最新的图传产品,工作范围可达2km。 开源无人机 和上述容易组装但封闭的无人机不同,3DRobotics和Arducopter在Arduino平台的基础上进行改进,提供模块化DIY解决方案。这些无人机使用可以自定义编程的ArdupilotMega(APM)或性能更高的Pixhawk飞控。由于飞控软件复杂度不断增加,对硬件要求越来越高,至Arducopter3.3以后版本固件已不再支持APM飞控硬件。另外这些飞控支持各种外设的扩展:传感器、其他控制器和通信模块。Arducopter无人机通常是DIY定制的,但有完整的工具包以及提供RTF或几乎RTF的解决方案。3DR也推出有一款RTF多轴飞行器Iris+,售价750美元,重量1300g。和几乎可以实现RTF的ArducopterQuad,售价620美元,重量跟前者类似。与其他性质的平台产品对比,ArducopterUAVs虽然需要用户更多的无人机知识和组装调试工作,但却是高度开放且可定制的。最近刚推出的平台是3DRSolo,这个一款用户友好的RTF无人机,具有更强的能力(飞行器的续航时间增长可达20分钟,安装了一部GoPro相机,采用双控制器结构,一个为传统飞控,一个用于视频处理与云台控制)。 在传感器方面,较新的Pixhawk控制器带有内置陀螺仪、加速度计和气压传感器。在视觉部分,Iris+上可以使用云台外扩摄像头。Pixhawk提供了一款PX4FLOW的光流模块,可用于导航。但由于其分辨率低(只有752×480像素的分辨率),它并不能对视频进行录制。 上述无人机主要用于航拍和娱乐方面。尽管价格范围不同,但是用于稳定的传感器的类型是相似的。很明显,更昂贵的解决方案可提供更好的稳定性。在视觉方面,支持安装外部摄像机的平台可以进行视频录制。然而,如果使用AR.Drone无人机平台或px4flow模块,使用集成的视觉模块将会简化平台的使用。AR.Drone2所提供的图像质量和速率已经足够用于基于视觉的导航和环境捕获。 感知与控制 在户外飞行的传统无人机可通过连续测量并融合来自惯性测量单元(IMU)和全球定位系统(GPS)的数据来调节飞行姿态(横滚、俯仰和偏航)以及位置(×、y和z)(下图)。
其中IMU包含三轴加速度计和陀螺仪。这对于感知运动及自主性是必不可少的,从小型娱乐级至专业级的无人机均在使用。然而,在距离地面仅几米高且在密闭的区域内飞行时,全球定位系统信息在高度调节上是不足够精确的,也并不一直是有效可靠的,由于遮蔽GPS信号可能会丢失。在一些复杂环境里,如在城市、森林和建筑物中。即使全球定位系统信息是可靠有效的,也需要辅助结合一个无人机周围环境的精确地图,以规划无障碍的飞行轨迹。然而,如那些用于汽车驾驶导航系统、提供道路提醒的数字地图,它们并不包括三维信息(自然结构、建筑物、桥梁的高度和电缆、电线杆等障碍物,等等),也没有足够快的刷新频率来捕捉地面景物的变化。因此,低空飞行的小型无人机需要更复杂的控制自主权和额外的传感器,以检测周围环境的距离并按照安全稳定的轨迹飞行。关于无人机防撞的传感器及相关技术可参阅本人的另一篇文章如何避免撞机:无人机规避技术分析: 传统的基于IMU和GPS的感知-控制技术已经非常成熟并已有大量产品上市,在此不再赘述。对于低载荷、功耗敏感的小型无人机而言,机器视觉是一种很有前景的传感方式,因为与其他距离传感器如声纳、红外和陆地车上用的激光测距仪相比,它不需要发射能量来了解环境,功耗更低。另外,它可以收集更丰富的信息和捕获更多的地面景物和其他传感器的质量相媲美。立体视觉的简单介绍可参阅本人的另一篇文章。 另外还有基于仿生学的视觉技术,如复眼定焦,利用低分辨率但较多的摄像机。相比双目图像重叠更小,也不需要立体视觉的距离估计。生物学家发现,昆虫在杂乱的环境中仍可安全飞行,它们依靠的不是图像运动,而是被称为光流的那个东西测量自己和周围环境的位移。实验结果表明,使用光流无人机可实现大量的、各种各样的飞行能力。如避障、速度保持、里程估计、沿墙或走廊飞行、高度估计、航向控制、降落等。在产品领域,光流技术目前也已成功地得到应用,如四旋翼的底部光流在无GPS的情况下可维持恒定的速度或悬停。固定翼无人机前向安装的光流,用于检测靠近地面的障碍物。以及用于测量无人机姿态的旋转光流等。 自主飞行 感知-控制技术是机器人自主能力的基础。根据国际标准化组织的定义,机器人的自主能力是指机器在无人干预下,可以根据当前的状态和感知信息执行任务的能力。很多情况下,根据机器人的类型和要其预期的用途,对机器人自主性的要求也不尽相同。例如,虽然地面上那些连着插座固定式的机器人不必关心能量管理问题,但对于长距离工作的移动式机器人尤其是无人机而言,知道何时要停下当前任务去给自己充点电的能力就很重要了。在这里我们讨论的小型无人机,可以按自主性由低到高将他们分为以下三个层次。目前对达到2~3级自主水平,即具备反应自主性和认知自主性的无人机,我们就可以理直气壮地称其为空中机器人啦。 感知-运动自主性:将人的高级指令(比如到达一个给定的高度,按照圆形轨迹飞行,移动到某一个GPS坐标点或保持在某个位置)转化成平台相关控制信号(比如俯仰角、横滚角、偏航角或速度)的组合;利用GPS航点,按照预先编好的轨迹飞行。 反应自主性(需要以感知运动自主性为基础):在外部有干扰时保持在当前位置或飞行轨迹上,比如在有风或电器机械故障的情况下;躲避障碍物;保持在距离地面安全的或预定的高度;跟随移动的物体或其他飞行器飞行;自动起飞和着陆。 认知自主性(需要以反应自主性为基础):进行SLAM同步定位和绘制地图;解决信息和任务冲突;规划(例如电池充电);识别物体和人;学习。 当前的商业化产品,以上文介绍的几款主流产品为例,它们均达到了感知-运动自主性水平,部分具备反应自主性。但其成熟度仍不足以自动完成大多数行业应用领域中的任务,如摄影、监视、勘探等,目前仍需要经验丰富的操作人员进行监视或操控。 展望 我们认为未来民用无人机市场的进一步扩大,有赖于以下三个方面的改善:1.自主能力2.安全策略3.法律框架 我们目前尚无法预期未来五年会实现更高水平的自主控制。但当前法律要求认证的操作员在视线内操作无人机,则会限制无人机自主能力方面的发展,迫使企业和研发机构更多的去关注机械可靠性和安全性等问题。然并卵,即便缓慢,无人机自主性的提高也是必然的,这终将会挑战并颠覆现有的法律框架。 在未来,我们预期仿生学的方法将成为主导,因为它只需要相对简单的计算和传感器。例如一些产品(如eBee和AR.Drone0)。在科学领域,一个有趣挑战将是将不同的导航功能集成到一个控制系统中,构成类似于飞行昆虫的神经系统。同时,在工程领域,一个重要的工作是政府机构和行业协会定义测试条件及性能标准,对无人机技术的功能和可靠性进行评估,通过建立完善的安全策略与评价机制规范无人机的运行,而非法律手段的限制。 另外人工智能的发展以及智能手机的改进,将会进一步扩大小型无人机的应用范围,比如能够识别人类用户、学习他们的行为、创建并表示周围的环境。人脸识别、基于手势的交互、可穿戴设备的广泛使用将进一步刺激玩具无人机的发展。随着移动计算行业继续沿着硬件小型化、服务云端化的方向发展。开发人员将会获得体积更小、功率更低的传感器,电池的能量密度也会不断提高。同时无人机接入网络,也为未来应用提供了无限的可能性。 |
| 上一篇:巴西将用无人机监测亚马孙雨林火情 下一篇:俯瞰颍淮大型航拍活动 90幅航拍照片亮相 |
版权所有:2024大湾区国际医疗消毒感控及空气净化展览会组委会
联系人:潘经理 先生 手 机/微 信:188-0182-3515 沪ICP备20019626号-7
商务QQ : 916984268 E-mail : 916984267@qq.com